人型重機が切り拓く未来:「あまねく世界からフィジカルな苦役を無用とする」社会の実現に向けた第一歩
人の操作による自在な全身動作が可能な人型重機の研究開発を加速
[画像1: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-81843992a43ed67cd0f2cc61528da4a9-3900x2194.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
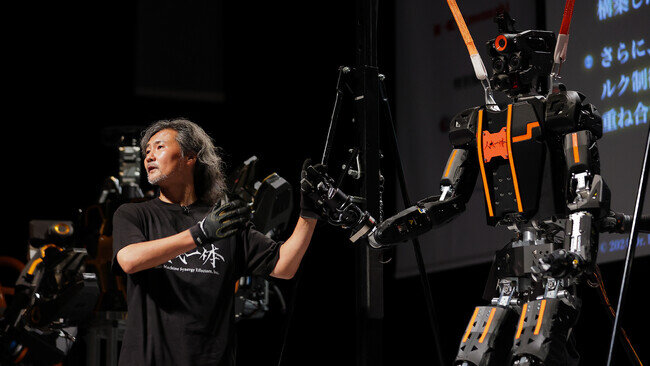
株式会社人機一体(滋賀県草津市、代表取締役社長:金岡博士、以下「人機一体」)は、2024 年 08 月 01 日(木)開催の「株式会社人機一体 成果発表会 2024」において人型重機の下半身制御のコア技術となる「ハイブリッド・オートバランス制御(HABC)」を実装したロボット『零一式カレイド ver.1.1』のバランス制御デモンストレーションを実施しました。今後、独自の人型重機ハードウェア開発に着手し、2039 年末までに「あまねく世界からフィジカルな苦役を無用とする」という BHAG(※1)の達成を目指し、人型重機をはじめとしたロボットが日常的に活用される社会の実現に向けて研究開発を進めてまいります。
(※1)BHAG =社運を賭けた大胆な目標
◇関連プレスリリース
https://prtimes.jp/main/html/rd/p/000000037.000070266.html
人型重機の開発変遷とロードマップ
上半身の開発
かねてより人型重機の上半身部分にあたるロボットの研究開発を進めており、2014 年に日本テレビ「ロボット日本一決定戦!リアルロボットバトル」での企画向けに開発した『MMSEBattroid ver.0』を皮切りに、2020 年からは西日本旅客鉄道株式会社(以下、「JR 西日本」)および日本信号株式会社(以下「日本信号」)と鉄道設備メンテナンスにおける高所重作業の解消に向けた PoC 試作機『零式人機』シリーズの共同研究開発に取り組んでまいりました。
[画像2: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-7563ab0ee9487731c9c3664851822382-1920x725.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]▲ 人機一体における人型上半身ロボットの開発の歴史
そして、実用化のベースとなる PoC 試作機『零式人機 ver.2.0』で使用している人機一体の特許技術等のライセンスに基づき、メーカである日本信号により『多機能鉄道重機』が製品化され、2024 年 07 月には JR 西日本の和歌山線で初めて実作業に使用されました。今後様々な営業線で高所での鉄道メンテナンス作業に使用されていく予定です。
◇関連プレスリリース
https://prtimes.jp/main/html/rd/p/000000036.000070266.html
[画像3: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-3ae9e7447821e82acdea60eecfac70c9-3900x2925.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]▲ JR 西日本の和歌山線での作業(提供:JR 西日本)
下半身の開発
上半身部分にあたるロボットの実用化に重きを置いて研究開発を進めてきた一方で、下半身部分についても独自開発ロボットを用いた制御システム等の研究開発を着々と進めてまいりました。
2023 年 11 月からは川崎重工業株式会社が開発したヒューマノイドロボット『Kaleido』に人機一体独自の制御技術を実装するための研究開発を進め、2024 年 08 月 01 日(木)に下半身制御技術である「ハイブリッド・オートバランス制御(HABC)」を実装した『零一式カレイド ver.1.1』(※2)として披露、バランス制御デモンストレーションを実施しました。なお、本実装は、広島大学機械力学研究室(菊植亮教授)との共同研究によるものです。
[画像4: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-fc636da44835e1d9fd14931e6c789a1f-1793x950.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]▲ ハイブリッド・オートバランス制御の概要図
ハイブリッド・オートバランス制御(HABC) とは
歩行計画のような上位の制御をコンピュータではなく人間の操作に、バランス維持のような下位の制御をコンピュータに任せ、これらを力制御ベースで統合(重ね合わせ)することで、臨機応変な人間の判断能力と、コンピュータの正確・精密な制御能力を両立することができます。
[動画1: https://www.youtube.com/watch?v=rr0WzznJ-zk ]
本リリース時点では、低速度の歩行操作のみを許容する初歩的な歩行制御技術の実装となっていますが、より高度な歩行制御技術を重畳することで事前に路面状況を把握することができない未知環境下であっても人間はバランスを気にすることなく、瓦礫の上など不安定な足場であっても安定的に非定型作業を遂行することができます。さらにはモビリティにとどまらない人間の下肢のスキルを、ロボットの脚部に反映することが可能となります。
[画像5: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-60a3d6ea3b5c28a31c8966e52e7fb920-3544x2658.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]▲ バランス制御デモの様子
今後の開発ロードマップ
人型重機の社会実装に向けた最初のステップとして、上半身と下半身ともに人機一体の力制御技術をベースとした人の操作による動作が可能なことについて原理検証が完了しました。
ソフトウェアの面では、主にハイブリッド・オートバランス制御の改良を進め、単純に歩かせるだけでなく、真の意味で人間の作業を代替できるような多様な下半身のスキルを発揮するための制御技術について研究開発を進めてまいります。
ハードウェアの面では、LOVOT、零式人機等のデザイナー 根津孝太氏 、マクロスシリーズ等のアニメーション監督・デザイナー 河森正治氏と共同開発プロジェクトとして人機一体独自のハードウェア開発を進めてまいります。2024 年度から 2026 年度にかけて各コンセプトデザインをベースとした第一号試作機の開発を目指します。
「あまねく世界からフィジカルな苦役を無用とする」の実現に向けて、人型重機をシンボルとしてソフトウェア・ハードウェアの両面で今後の研究開発を強化、加速していきます。
◇関連プレスリリース
https://prtimes.jp/main/html/rd/p/000000041.000070266.html
[画像6: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-f796d45a0f0d513ef1ea843c2be45b9d-1920x1080.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
人型重機をシンボルとする意味
インフラメンテナンスの現場をはじめ、依然として人が生身で対応せざるを得ない重作業や危険作業(フィジカルな苦役)が数多く存在しています。人機一体は、これらの作業を先端ロボット工学技術で機械化するための研究開発を進めていますが、作業内容によっては、人型以外のロボットの方がより実用的である場合もあり、実際に様々な形状のロボットを研究開発しています。また、人型重機においても、必ずしも二足歩行型が最適とは限らず、下半身を軌陸高所作業車や車輪、クローラとする方が適している場合もあります。
[画像7: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-f0f010dc3b79da2ce6ee1da0c9bd2c0c-1920x1080.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]▲ 人型重機以外の開発ロボット[画像8: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-82497b3b2e081a38d92b78d3ec48de56-1691x951.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]▲ 人機一体の考える人型重機の形式
一方で、人型重機には多くのフィジカルな苦役を代替する大きな可能性が秘められています。特に二足歩行型の人型重機については、下半身を単なる移動手段ではなく、上半身と同様に人と同等のスキルを発揮するための機構として捉えることで、より広範な人間の作業を代替できると考えています。
我々は、人型以外のロボット開発を進めながらも、人型重機をシンボルとして掲げて研究開発を進めることで、広く社会の注目を集め、フィジカルな苦役を抱える企業に対して、その課題を解決し得る技術が存在することを発信していきます。そして、人型重機を通じて、社会におけるフィジカルな苦役のニーズを集約し、「あまねく世界からフィジカルな苦役を無用とする」という BHAG を実現します。
[動画2: https://www.youtube.com/watch?v=WA04lTOsdKo ]
株式会社人機一体 会社概要
代表者 :金岡博士(Dr. KANAOKA)
所在地 :滋賀県草津市青地町648番地1
創立 :2007 年 10 月 01 日
創業 :2015 年 10 月 01 日(現商号への変更日)
資本金 :1 億円
事業内容:先端ロボット工学技術に基づく新規事業開発支援のための知的財産活用サービス
URL :https://www.jinki.jp/
[画像9: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-2f41cec2087c06cb31c6460a9eab9e1d-3900x1824.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
人機一体は、先端ロボット工学技術を駆使した人間機械相乗効果器、すなわち人機の具現化および産業化により「あまねく世界からフィジカルな苦役を無用とする」ことを目指す立命館大学発ロボティクススタートアップです。滋賀県内で唯一「J-Startup KANSAI」(※3)に選定されております。
[画像10: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-08a44731d0887f1d705e89c4aee109cb-1200x600.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
経済産業省の J-Startup プログラムの地域展開として、関西から世界へはばたく有望なスタートアップを選定し、公的機関と民間企業が連携して地域ぐるみで集中支援を実施することで、選定企業の飛躍的な成長をサポートする事業です。

[画像1: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-81843992a43ed67cd0f2cc61528da4a9-3900x2194.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
株式会社人機一体(滋賀県草津市、代表取締役社長:金岡博士、以下「人機一体」)は、2024 年 08 月 01 日(木)開催の「株式会社人機一体 成果発表会 2024」において人型重機の下半身制御のコア技術となる「ハイブリッド・オートバランス制御(HABC)」を実装したロボット『零一式カレイド ver.1.1』のバランス制御デモンストレーションを実施しました。今後、独自の人型重機ハードウェア開発に着手し、2039 年末までに「あまねく世界からフィジカルな苦役を無用とする」という BHAG(※1)の達成を目指し、人型重機をはじめとしたロボットが日常的に活用される社会の実現に向けて研究開発を進めてまいります。
(※1)BHAG =社運を賭けた大胆な目標
◇関連プレスリリース
https://prtimes.jp/main/html/rd/p/000000037.000070266.html
人型重機の開発変遷とロードマップ
上半身の開発
かねてより人型重機の上半身部分にあたるロボットの研究開発を進めており、2014 年に日本テレビ「ロボット日本一決定戦!リアルロボットバトル」での企画向けに開発した『MMSEBattroid ver.0』を皮切りに、2020 年からは西日本旅客鉄道株式会社(以下、「JR 西日本」)および日本信号株式会社(以下「日本信号」)と鉄道設備メンテナンスにおける高所重作業の解消に向けた PoC 試作機『零式人機』シリーズの共同研究開発に取り組んでまいりました。
[画像2: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-7563ab0ee9487731c9c3664851822382-1920x725.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]▲ 人機一体における人型上半身ロボットの開発の歴史
そして、実用化のベースとなる PoC 試作機『零式人機 ver.2.0』で使用している人機一体の特許技術等のライセンスに基づき、メーカである日本信号により『多機能鉄道重機』が製品化され、2024 年 07 月には JR 西日本の和歌山線で初めて実作業に使用されました。今後様々な営業線で高所での鉄道メンテナンス作業に使用されていく予定です。
◇関連プレスリリース
https://prtimes.jp/main/html/rd/p/000000036.000070266.html
[画像3: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-3ae9e7447821e82acdea60eecfac70c9-3900x2925.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]▲ JR 西日本の和歌山線での作業(提供:JR 西日本)
下半身の開発
上半身部分にあたるロボットの実用化に重きを置いて研究開発を進めてきた一方で、下半身部分についても独自開発ロボットを用いた制御システム等の研究開発を着々と進めてまいりました。
2023 年 11 月からは川崎重工業株式会社が開発したヒューマノイドロボット『Kaleido』に人機一体独自の制御技術を実装するための研究開発を進め、2024 年 08 月 01 日(木)に下半身制御技術である「ハイブリッド・オートバランス制御(HABC)」を実装した『零一式カレイド ver.1.1』(※2)として披露、バランス制御デモンストレーションを実施しました。なお、本実装は、広島大学機械力学研究室(菊植亮教授)との共同研究によるものです。
[画像4: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-fc636da44835e1d9fd14931e6c789a1f-1793x950.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]▲ ハイブリッド・オートバランス制御の概要図
ハイブリッド・オートバランス制御(HABC) とは
歩行計画のような上位の制御をコンピュータではなく人間の操作に、バランス維持のような下位の制御をコンピュータに任せ、これらを力制御ベースで統合(重ね合わせ)することで、臨機応変な人間の判断能力と、コンピュータの正確・精密な制御能力を両立することができます。
(※2) 零一式カレイドや HABC 等の技術詳細については、添付の「株式会社人機一体 + 技術詳細資料.pdf」を御参照ください。
[動画1: https://www.youtube.com/watch?v=rr0WzznJ-zk ]
本リリース時点では、低速度の歩行操作のみを許容する初歩的な歩行制御技術の実装となっていますが、より高度な歩行制御技術を重畳することで事前に路面状況を把握することができない未知環境下であっても人間はバランスを気にすることなく、瓦礫の上など不安定な足場であっても安定的に非定型作業を遂行することができます。さらにはモビリティにとどまらない人間の下肢のスキルを、ロボットの脚部に反映することが可能となります。
[画像5: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-60a3d6ea3b5c28a31c8966e52e7fb920-3544x2658.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]▲ バランス制御デモの様子
今後の開発ロードマップ
人型重機の社会実装に向けた最初のステップとして、上半身と下半身ともに人機一体の力制御技術をベースとした人の操作による動作が可能なことについて原理検証が完了しました。
ソフトウェアの面では、主にハイブリッド・オートバランス制御の改良を進め、単純に歩かせるだけでなく、真の意味で人間の作業を代替できるような多様な下半身のスキルを発揮するための制御技術について研究開発を進めてまいります。
ハードウェアの面では、LOVOT、零式人機等のデザイナー 根津孝太氏 、マクロスシリーズ等のアニメーション監督・デザイナー 河森正治氏と共同開発プロジェクトとして人機一体独自のハードウェア開発を進めてまいります。2024 年度から 2026 年度にかけて各コンセプトデザインをベースとした第一号試作機の開発を目指します。
「あまねく世界からフィジカルな苦役を無用とする」の実現に向けて、人型重機をシンボルとしてソフトウェア・ハードウェアの両面で今後の研究開発を強化、加速していきます。
◇関連プレスリリース
https://prtimes.jp/main/html/rd/p/000000041.000070266.html
[画像6: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-f796d45a0f0d513ef1ea843c2be45b9d-1920x1080.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
人型重機をシンボルとする意味
インフラメンテナンスの現場をはじめ、依然として人が生身で対応せざるを得ない重作業や危険作業(フィジカルな苦役)が数多く存在しています。人機一体は、これらの作業を先端ロボット工学技術で機械化するための研究開発を進めていますが、作業内容によっては、人型以外のロボットの方がより実用的である場合もあり、実際に様々な形状のロボットを研究開発しています。また、人型重機においても、必ずしも二足歩行型が最適とは限らず、下半身を軌陸高所作業車や車輪、クローラとする方が適している場合もあります。
[画像7: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-f0f010dc3b79da2ce6ee1da0c9bd2c0c-1920x1080.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]▲ 人型重機以外の開発ロボット[画像8: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-82497b3b2e081a38d92b78d3ec48de56-1691x951.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]▲ 人機一体の考える人型重機の形式
一方で、人型重機には多くのフィジカルな苦役を代替する大きな可能性が秘められています。特に二足歩行型の人型重機については、下半身を単なる移動手段ではなく、上半身と同様に人と同等のスキルを発揮するための機構として捉えることで、より広範な人間の作業を代替できると考えています。
我々は、人型以外のロボット開発を進めながらも、人型重機をシンボルとして掲げて研究開発を進めることで、広く社会の注目を集め、フィジカルな苦役を抱える企業に対して、その課題を解決し得る技術が存在することを発信していきます。そして、人型重機を通じて、社会におけるフィジカルな苦役のニーズを集約し、「あまねく世界からフィジカルな苦役を無用とする」という BHAG を実現します。
[動画2: https://www.youtube.com/watch?v=WA04lTOsdKo ]
株式会社人機一体 会社概要
代表者 :金岡博士(Dr. KANAOKA)
所在地 :滋賀県草津市青地町648番地1
創立 :2007 年 10 月 01 日
創業 :2015 年 10 月 01 日(現商号への変更日)
資本金 :1 億円
事業内容:先端ロボット工学技術に基づく新規事業開発支援のための知的財産活用サービス
URL :https://www.jinki.jp/
[画像9: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-2f41cec2087c06cb31c6460a9eab9e1d-3900x1824.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
人機一体は、先端ロボット工学技術を駆使した人間機械相乗効果器、すなわち人機の具現化および産業化により「あまねく世界からフィジカルな苦役を無用とする」ことを目指す立命館大学発ロボティクススタートアップです。滋賀県内で唯一「J-Startup KANSAI」(※3)に選定されております。
[画像10: https://prcdn.freetls.fastly.net/release_image/70266/42/70266-42-08a44731d0887f1d705e89c4aee109cb-1200x600.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
(※3)「J-Startup KANSAI」とは
経済産業省の J-Startup プログラムの地域展開として、関西から世界へはばたく有望なスタートアップを選定し、公的機関と民間企業が連携して地域ぐるみで集中支援を実施することで、選定企業の飛躍的な成長をサポートする事業です。
![]()