ティアフォー、JAXA宇宙探査イノベーションハブ研究課題に採択 Neural Simulator開発で自動運転の世界モデル実用化を加速
2024年3月25日(月)11時16分 PR TIMES
オープンソースの自動運転ソフトウェアを先導するhttps://tier4.jp/(以下「ティアフォー」)は、https://www.jaxa.jp/(以下「JAXA」)のhttps://www.ihub-tansa.jaxa.jp/が行う「太陽系フロンティア開拓による人類の生存圏・領域拡大に向けたオープンイノベーション」に関する第11回研究提案募集(Request for Proposal:RFP)にて「自動運転の大規模走行環境に向けたNeural Radiance Fields(NeRF)*1 による高品質センサシミュレーション技術」を提案し、採択されました。
[画像1: https://prcdn.freetls.fastly.net/release_image/40119/58/40119-58-a28c1245b762a0677023dff637b1e2ef-1920x1080.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
研究概要
本研究では、自動運転の走行環境シミュレーション向けに、高品質かつ大規模なデジタルツインの開発を促進します。注目を集める世界モデルの一例であるNeRFを基に、車載カメラやLiDARなどのセンサデータからNeRFモデルを事前に構築し、写実的かつ低コストで自動運転の環境認識機能の検証を可能にするNeural Simulatorの開発に取り組みます。これにより、地上のみならず宇宙でも利用可能な自動運転シミュレーション環境の構築を目指します。
今後の展開
2024年4月より、本RFPに基づく研究を開始する予定です。ティアフォーは、誰もがテクノロジーの発展に貢献できる「自動運転の民主化」をビジョンとして掲げ、ディープテック企業として、自動運転技術の発展と持続可能な社会の実現に貢献していきます。
本研究への取り組みに関して
技術的背景
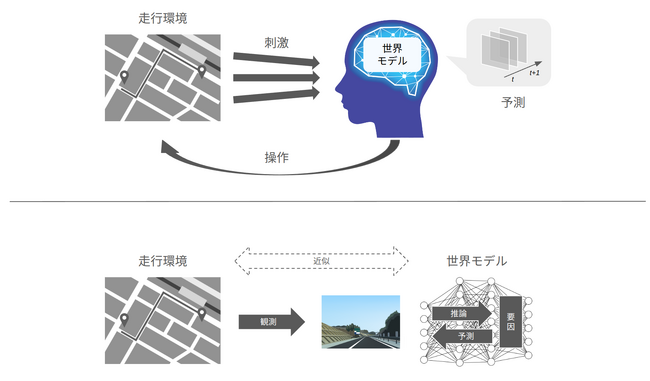
ティアフォーは、https://matsuo-institute.com/(以下「松尾研究所」)と2020年からhttps://tier4.jp/media/detail/?sys_id=37Kcau0xqvp1eKNqIgL7Yy&category=NEWSを行っており、世界モデルを含む自動運転ソフトウェアの基本コンポーネントの開発を進めています。世界モデルとは、観測情報に基づいて世界の構造を近似するように学習するモデルです。自動運転への応用を通して、現在のセンサなどの観測から未来の状況を予測し、それに基づいた運転の計画や学習を可能にすることを目指しています。
世界モデルの概要
ティアフォーと松尾研究所は、自動運転ソフトウェアで扱うセンサデータやシナリオ、地図データなどのマルチモーダルデータを活用し、拡張可能な世界モデルの開発を推進しています。近年の大規模言語モデル(Large Language Models:LLM)やNeRFの取り組みを基に、両社のノウハウやリソースを活用した独自の大規模世界モデルの構築を目指しています。最終的には、主にロボットタクシーを想定した自動運転における状況予測や運転計画、さらにシステムの安全性評価やAIモデルの学習など、様々な実問題への応用を目的としています。
[画像2: https://prcdn.freetls.fastly.net/release_image/40119/58/40119-58-f94385d9d6b08ae7ec8839ab3f596da5-1722x1009.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]世界モデルの概要
[画像3: https://prcdn.freetls.fastly.net/release_image/40119/58/40119-58-a84175806701314ae8a734b9b8c84cbf-1880x349.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]Neural Simulatorの出力例(カメラ画像真値とモデル予測出力)
[画像4: https://prcdn.freetls.fastly.net/release_image/40119/58/40119-58-cc4d6b9c69679df8917342045a415723-1715x645.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]Neural Simulatorの出力例(LiDAR点群真値とモデル予測出力)
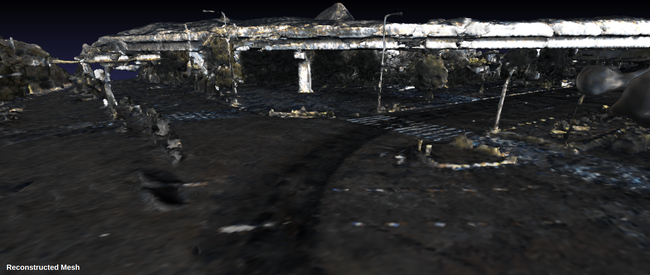
[画像5: https://prcdn.freetls.fastly.net/release_image/40119/58/40119-58-d2df03e6db25977787bef790ea96b020-1879x796.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]Neural Simulatorの出力例(3次元復元結果)
ティアフォーおよび技術協力先の代表者コメント
ティアフォー 代表取締役社長CEO兼CTO 加藤真平のコメント
世界モデルは、ロボットタクシーを始めとした自動運転における様々な課題を解決する可能性を持っています。研究開発機関や教育機関と連携しつつ、当社が強みとする自動運転の技術開発を活かすことにより、技術の社会実装を進めていきます。また、https://github.com/autowarefoundation/autoware*2 の開発をリードする会社として、この最先端の技術をオープンにすることで、より多くのパートナーが地上のみならず宇宙も視野に入れた技術開発を推進できる基盤作りを目指します。
松尾研究所 代表取締役 川上登福のコメント
松尾研究所は、「産学共創によるイノベーションのスパイラルを実現する」ことを目標に掲げ、産業界の企業との共同研究を通じて、アカデミアで生み出された先端技術の社会実装を進めてきました。ティアフォーとはこれまでに、最新の深層学習を用いた認識技術や昨今注目を集める世界モデルに取り組み、完全自動運転の実現を目指してきました。今後も先進的な技術をハイスピードで実装し社会へのインパクトを最大化する取り組みを進めていきます。
東京大学 松尾研究室 松尾豊教授のコメント
世界モデルは、人間の外界に関する知的能力をモデル化した技術であり、各国の企業が注目・活用する動きが始まっています。世界モデルが社会に実装されていくことで、今後様々なサービスがスマート、インテリジェントになり、自動化されていくと思います。自動運転を通して、ティアフォーがより良い文化やより快適な日常を生み出すことを楽しみにしています。
*1 様々な角度から撮影した複数の写真を用いて、そのシーンを3次元形状で復元し、新たな視点からの画像を生成する技術。
*2 Autowareは、The Autoware Foundationの登録商標です。
ティアフォーについて
ティアフォーは、「自動運転の民主化」をビジョンとし、世界初のオープンソースの自動運転ソフトウェア「Autoware」の開発を主導するディープテック企業として、自動運転システムの社会実装を推進しています。「Autoware」を活用したソフトウェアプラットフォームを自社製品として提供し、これらの製品を基盤に市場の需要に対応したソリューションを展開しています。世界各地のパートナーと協力して、Autowareが生み出すエコシステムを通じて、個人から組織まで、全てのステークホルダーと共に自動運転システムの可能性を拡大し、より良い社会の実現を目指しています。
━━会社概要━━
【社名】株式会社ティアフォー
【所在地】東京都品川区
【URL】https://tier4.jp
【設立年月】2015年12月
【主な事業内容】
・自動運転プラットフォーム開発事業
・自動運転ウェブサービス開発事業
・自動運転システム開発キット販売事業
・自動運転技術の教育事業
松尾研究所について
株式会社松尾研究所は国立大学法人 東京大学 工学系研究科 松尾研究室に伴走し、大学を中心としたイノベーションを生み出す「エコシステム」を作り、大きく発展させることを目的に設立された研究所です。松尾研究室の「研究」の成果・技術の「開発・実装」を行い、広く社会に普及を目指し、日本の産業競争力の向上に貢献しています。
━━会社概要━━
【社名】株式会社松尾研究所
【所在地】東京都文京区
【URL】 http://matsuo-institute.com
【設立年月】2020年2月
お問い合わせ先
Media Contact
pr@tier4.jp

[画像1: https://prcdn.freetls.fastly.net/release_image/40119/58/40119-58-a28c1245b762a0677023dff637b1e2ef-1920x1080.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
研究概要
本研究では、自動運転の走行環境シミュレーション向けに、高品質かつ大規模なデジタルツインの開発を促進します。注目を集める世界モデルの一例であるNeRFを基に、車載カメラやLiDARなどのセンサデータからNeRFモデルを事前に構築し、写実的かつ低コストで自動運転の環境認識機能の検証を可能にするNeural Simulatorの開発に取り組みます。これにより、地上のみならず宇宙でも利用可能な自動運転シミュレーション環境の構築を目指します。
今後の展開
2024年4月より、本RFPに基づく研究を開始する予定です。ティアフォーは、誰もがテクノロジーの発展に貢献できる「自動運転の民主化」をビジョンとして掲げ、ディープテック企業として、自動運転技術の発展と持続可能な社会の実現に貢献していきます。
本研究への取り組みに関して
技術的背景
ティアフォーは、https://matsuo-institute.com/(以下「松尾研究所」)と2020年からhttps://tier4.jp/media/detail/?sys_id=37Kcau0xqvp1eKNqIgL7Yy&category=NEWSを行っており、世界モデルを含む自動運転ソフトウェアの基本コンポーネントの開発を進めています。世界モデルとは、観測情報に基づいて世界の構造を近似するように学習するモデルです。自動運転への応用を通して、現在のセンサなどの観測から未来の状況を予測し、それに基づいた運転の計画や学習を可能にすることを目指しています。
世界モデルの概要
ティアフォーと松尾研究所は、自動運転ソフトウェアで扱うセンサデータやシナリオ、地図データなどのマルチモーダルデータを活用し、拡張可能な世界モデルの開発を推進しています。近年の大規模言語モデル(Large Language Models:LLM)やNeRFの取り組みを基に、両社のノウハウやリソースを活用した独自の大規模世界モデルの構築を目指しています。最終的には、主にロボットタクシーを想定した自動運転における状況予測や運転計画、さらにシステムの安全性評価やAIモデルの学習など、様々な実問題への応用を目的としています。
[画像2: https://prcdn.freetls.fastly.net/release_image/40119/58/40119-58-f94385d9d6b08ae7ec8839ab3f596da5-1722x1009.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]世界モデルの概要
[画像3: https://prcdn.freetls.fastly.net/release_image/40119/58/40119-58-a84175806701314ae8a734b9b8c84cbf-1880x349.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]Neural Simulatorの出力例(カメラ画像真値とモデル予測出力)
[画像4: https://prcdn.freetls.fastly.net/release_image/40119/58/40119-58-cc4d6b9c69679df8917342045a415723-1715x645.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]Neural Simulatorの出力例(LiDAR点群真値とモデル予測出力)
[画像5: https://prcdn.freetls.fastly.net/release_image/40119/58/40119-58-d2df03e6db25977787bef790ea96b020-1879x796.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]Neural Simulatorの出力例(3次元復元結果)
ティアフォーおよび技術協力先の代表者コメント
ティアフォー 代表取締役社長CEO兼CTO 加藤真平のコメント
世界モデルは、ロボットタクシーを始めとした自動運転における様々な課題を解決する可能性を持っています。研究開発機関や教育機関と連携しつつ、当社が強みとする自動運転の技術開発を活かすことにより、技術の社会実装を進めていきます。また、https://github.com/autowarefoundation/autoware*2 の開発をリードする会社として、この最先端の技術をオープンにすることで、より多くのパートナーが地上のみならず宇宙も視野に入れた技術開発を推進できる基盤作りを目指します。
松尾研究所 代表取締役 川上登福のコメント
松尾研究所は、「産学共創によるイノベーションのスパイラルを実現する」ことを目標に掲げ、産業界の企業との共同研究を通じて、アカデミアで生み出された先端技術の社会実装を進めてきました。ティアフォーとはこれまでに、最新の深層学習を用いた認識技術や昨今注目を集める世界モデルに取り組み、完全自動運転の実現を目指してきました。今後も先進的な技術をハイスピードで実装し社会へのインパクトを最大化する取り組みを進めていきます。
東京大学 松尾研究室 松尾豊教授のコメント
世界モデルは、人間の外界に関する知的能力をモデル化した技術であり、各国の企業が注目・活用する動きが始まっています。世界モデルが社会に実装されていくことで、今後様々なサービスがスマート、インテリジェントになり、自動化されていくと思います。自動運転を通して、ティアフォーがより良い文化やより快適な日常を生み出すことを楽しみにしています。
*1 様々な角度から撮影した複数の写真を用いて、そのシーンを3次元形状で復元し、新たな視点からの画像を生成する技術。
*2 Autowareは、The Autoware Foundationの登録商標です。
ティアフォーについて
ティアフォーは、「自動運転の民主化」をビジョンとし、世界初のオープンソースの自動運転ソフトウェア「Autoware」の開発を主導するディープテック企業として、自動運転システムの社会実装を推進しています。「Autoware」を活用したソフトウェアプラットフォームを自社製品として提供し、これらの製品を基盤に市場の需要に対応したソリューションを展開しています。世界各地のパートナーと協力して、Autowareが生み出すエコシステムを通じて、個人から組織まで、全てのステークホルダーと共に自動運転システムの可能性を拡大し、より良い社会の実現を目指しています。
━━会社概要━━
【社名】株式会社ティアフォー
【所在地】東京都品川区
【URL】https://tier4.jp
【設立年月】2015年12月
【主な事業内容】
・自動運転プラットフォーム開発事業
・自動運転ウェブサービス開発事業
・自動運転システム開発キット販売事業
・自動運転技術の教育事業
松尾研究所について
株式会社松尾研究所は国立大学法人 東京大学 工学系研究科 松尾研究室に伴走し、大学を中心としたイノベーションを生み出す「エコシステム」を作り、大きく発展させることを目的に設立された研究所です。松尾研究室の「研究」の成果・技術の「開発・実装」を行い、広く社会に普及を目指し、日本の産業競争力の向上に貢献しています。
━━会社概要━━
【社名】株式会社松尾研究所
【所在地】東京都文京区
【URL】 http://matsuo-institute.com
【設立年月】2020年2月
お問い合わせ先
Media Contact
pr@tier4.jp
![]()